
El sensor ultrasonico es uno de los sensores que viene incluido dentro de los componentes de los kits de fischertechnik. Es fácilmente reconocible: Este sensor es similar al HC-SR04, el cual es un sensor muy común que se utiliza con Arduino. Sobre este tema ya hemos publicado algunos contenidos en Panama Hitek:
Este tipo de sensor se utiliza para medir distancias, utilizando las propiedades del sonido. Es el mismo concepto que se utiliza para las ecografías con las que visualizan a los bebés mientras se encuentran dentro del vientre de la madre. 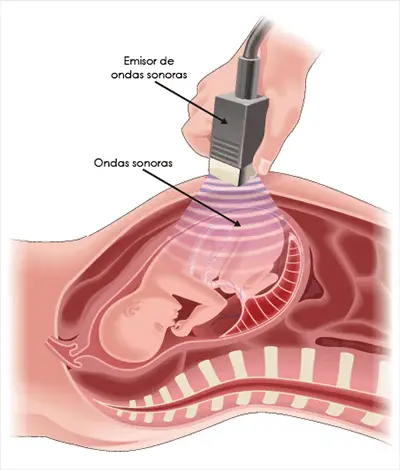 En ambos casos se emplea un emisor y un receptor de ondas sonoras. El emisor genera una onda sonora que rebota contra la materia y el eco es percibido por el receptor, el cual calcula distancias utilizando como parámetro la velocidad del sonido. El concepto va mucho más allá de esta sencilla explicación, pero a grandes rasgos este es el principio físico que se utiliza para darle funcionalidad a esta tecnología.
En ambos casos se emplea un emisor y un receptor de ondas sonoras. El emisor genera una onda sonora que rebota contra la materia y el eco es percibido por el receptor, el cual calcula distancias utilizando como parámetro la velocidad del sonido. El concepto va mucho más allá de esta sencilla explicación, pero a grandes rasgos este es el principio físico que se utiliza para darle funcionalidad a esta tecnología.
De forma similar, los robots utilizan sensores ultrasónicos para leer distancias. Los kits de legos de fischertechnik traen un sensor ultrasónico y una interfaz de software que nos permite leer los datos de este dispositivo. En el caso del sensor que viene incluido en el kit de fischertechnik, este posee 3 cables. Cuando un sensor posee 3 cables normalmente uno de esos cables corresponde a alimentación, el otro a tierra (GND) y el tercero es el cable de data. A la configuración de los cables de conexión de un sensor se le conoce como pinout. El pinout del sensor ultrasónico asociado a fischertechnik es el siguiente:  Para utilizar este sensor, simplemente lo conectamos al RoboTX Controller de la siguiente manera:
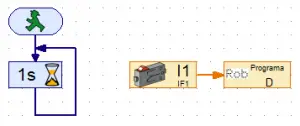
Para utilizar este sensor, simplemente lo conectamos al RoboTX Controller de la siguiente manera:  Para obtener lecturas de distancia desde este sensor, debemos ir primero al software RoboPro. Conectamos el RoboTX Controller a la computadora y abrimos creamos un nuevo programa. Lo primero que colocaremos en nuestro programa será configurar la pantalla LCD para que muestre las lecturas de distancia de nuestro sensor (véase Pantalla LCD en fischertechnik RoboTX Controller). Es necesario también colocar un elemento de inicio con un loop infinito.
Para obtener lecturas de distancia desde este sensor, debemos ir primero al software RoboPro. Conectamos el RoboTX Controller a la computadora y abrimos creamos un nuevo programa. Lo primero que colocaremos en nuestro programa será configurar la pantalla LCD para que muestre las lecturas de distancia de nuestro sensor (véase Pantalla LCD en fischertechnik RoboTX Controller). Es necesario también colocar un elemento de inicio con un loop infinito.
Ahora colocamos una entrada digital universal en la entrada del panel de visualización. La configuramos como sensor ultrasónico.  Debemos tomar en cuenta la entrada en la cual hemos conectado el sensor. Con esto estamos listos para utilizar el sensor. Simplemente corremos el programa y vemos el resultado. Si ejecutamos el programa en modo online, tendremos las lecturas de distancia en la pantalla de la computadora.
Debemos tomar en cuenta la entrada en la cual hemos conectado el sensor. Con esto estamos listos para utilizar el sensor. Simplemente corremos el programa y vemos el resultado. Si ejecutamos el programa en modo online, tendremos las lecturas de distancia en la pantalla de la computadora. 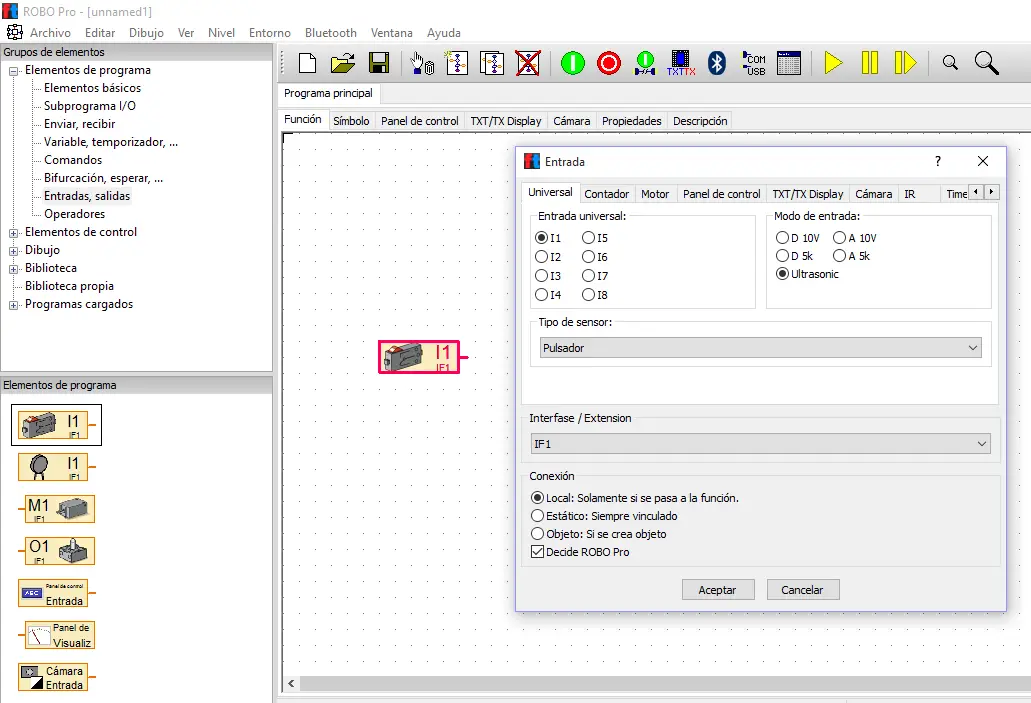 Si descargamos el programa en la memoria de RoboTX Controller podremos ver en la pantalla del RoboTX Controller la distancia medida por el sensor.
Si descargamos el programa en la memoria de RoboTX Controller podremos ver en la pantalla del RoboTX Controller la distancia medida por el sensor. 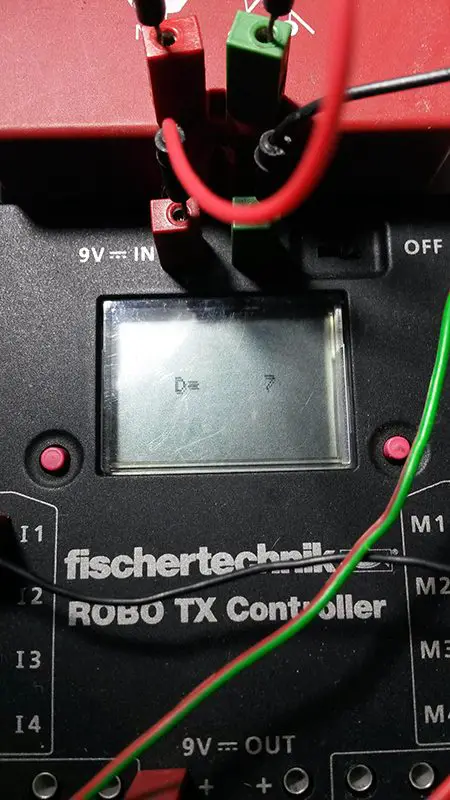 Con el sensor ultrasónico se pueden lograr muchas cosas en el campo de la robótica. Le compartimos una de ellas en el siguiente video.
Con el sensor ultrasónico se pueden lograr muchas cosas en el campo de la robótica. Le compartimos una de ellas en el siguiente video.
{kind=link}
Esperamos que la información suministrada sea de utilidad para ustedes. Saludos.