
Una de las principales características que posee el RoboTX Controller (RTC) es una pantalla LCD. La pantalla LCD en fischertechnik nos permite visualizar datos directamente desde el diagrama de flujo guardado en la memoria del controlador. Veamos:

¿Qué tal si aprendemos a programar esta pantalla para que muestre la información que nosotros queremos? Esto es muy sencillo. Primero necesitamos abrir el software con el que programamos el RTC, es decir, el RoboPro.
Este software posee en su barra de menú el botón Nivel, en el cual podemos escoger entre 5 niveles de programación. Cada nivel posee determinada cantidad de opciones. En Panama Hitek ya hemos escrito sobre el nivel de programación para principiantes. Nos tomamos la tarea de explicar todos y cada uno de los elementos disponibles en el nivel 1 de programación. Es probable que hagamos lo mismo para cada uno de los niveles, pero todo a su tiempo.
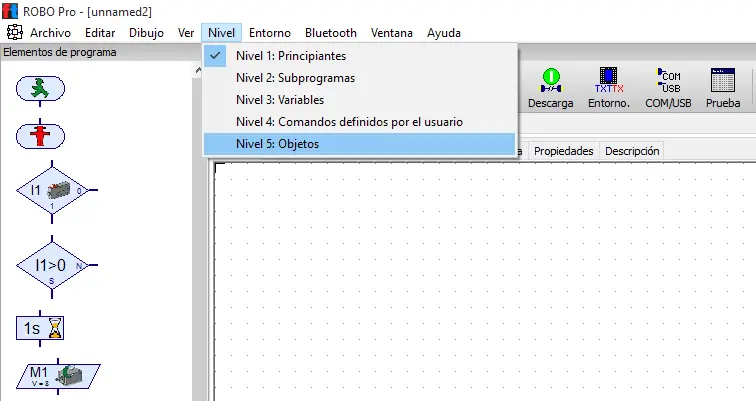
Por ahora necesitaremos activar el quinto nivel de programación, es decir, el más avanzado. Para ello vamos al menú nivel y escogemos Nivel 5: Objetos.
Nos aparece una nueva interfaz con más elementos que podemos agregar a nuestros diagramas de flujo.
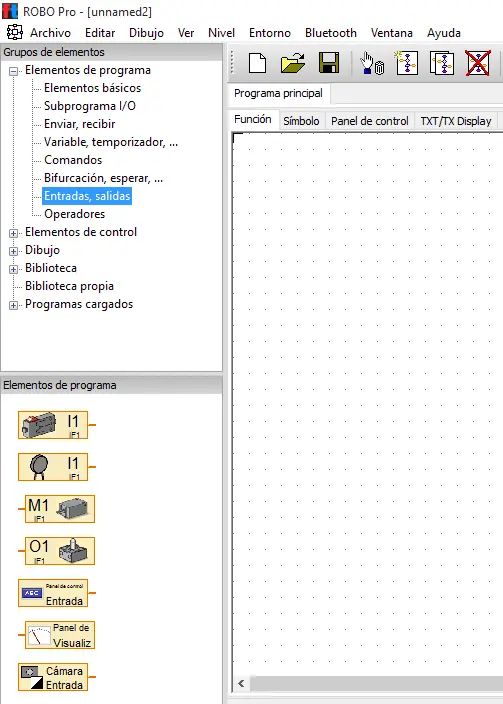
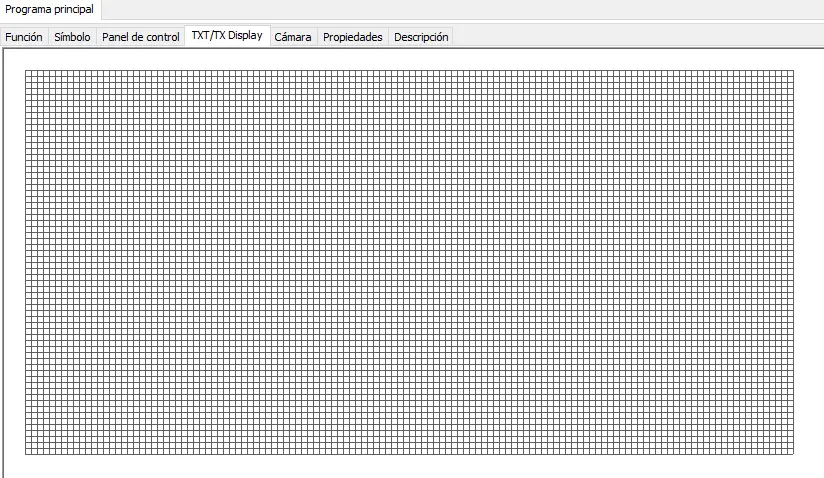
Dentro del RoboPro existe una pestaña con la inscripción TXT/TX Display, el cual es la interfaz para el LCD en fischertechnik RoboTX Controller. Al hacer clic en esta pestaña veremos una cuadrícula como la de la siguiente imagen.
En la parte de la izquierda veremos entre los elementos que podemos escoger, dentro del árbol Elementos de display de interfaz la opción «Formas«.
Ahora podemos «arrastrar»el símbolo de la X=0 a la cuadrícula de pixeles en la pestaña de TXT/TX Display. Una vez hemos insertado el elemento en la cuadrícula hacemos clic derecho y veremos lo siguiente:
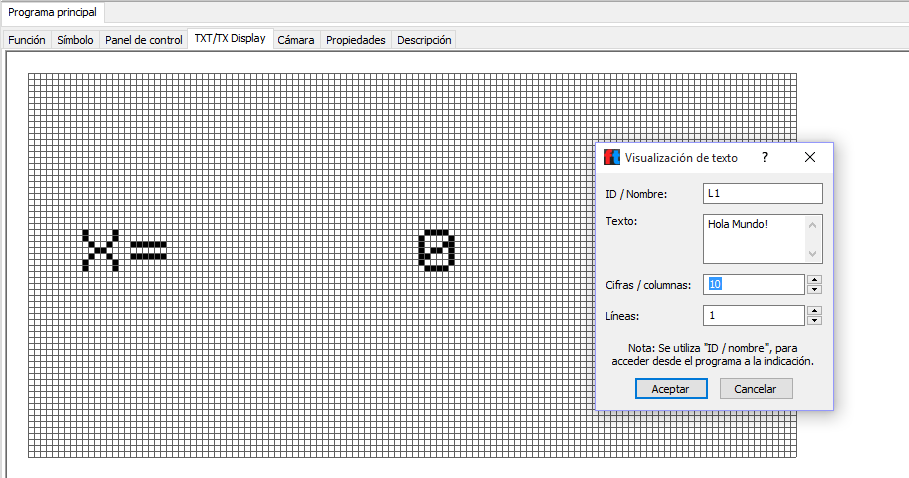
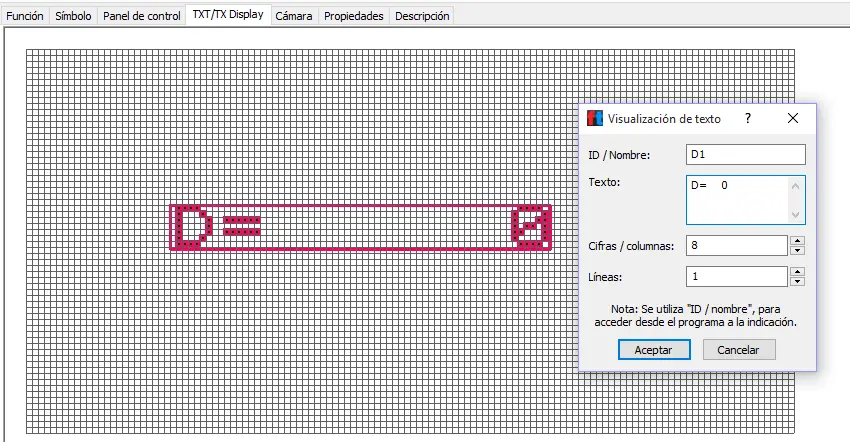
En el nombre colocamos un identificador, el cual llamaré L1. En texto colocamos lo que queremos mostrar: «Hola Mundo!». En cifras/columnas colocamos la cantidad de caracteres que poseerá el texto. En líneas irá la cantidad de renglones del texto.
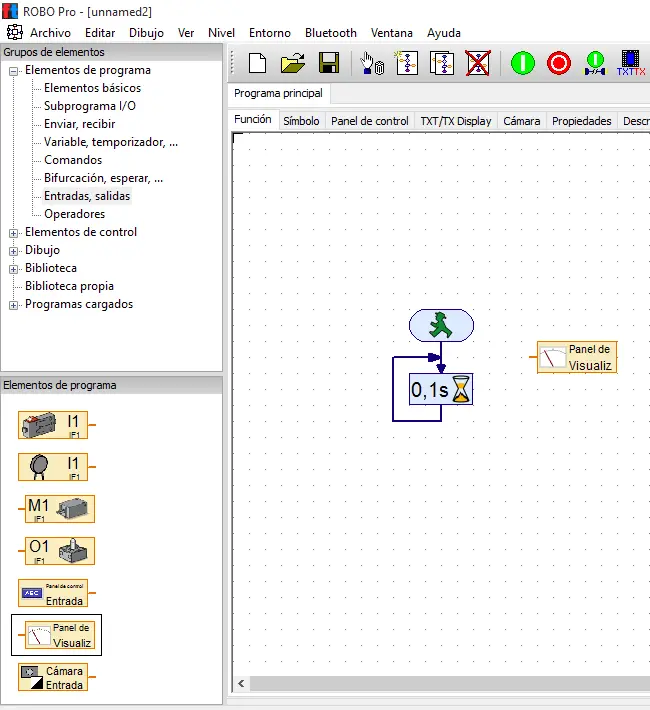
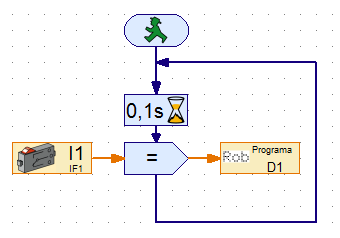
Ahora es necesario crear un pequeño diagrama de flujo que permita mostrar el texto en la pantalla. Para ello vamos a la pestaña «Función» y en la sección de la izquierda se localiza en Elementos de Programa/Entradas, Salidas/Panel de visualización. Lo agregamos al lienzo. A la vez, agregamos un símbolo de inicio y un delay de 0,1 segundos, formando un ciclo while infinito (véase Estructuras de Control en fischertechnik RoboPro).
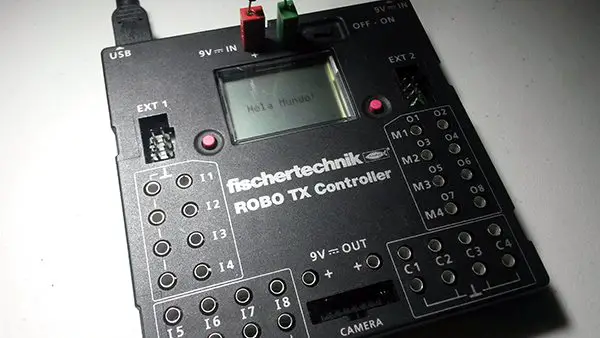
Ahora estamos listos para mostrar el mensaje en la pantalla del RTC. Necesitamos «descargar» el programa en el RTC. Para ello hacemos clic en el ícono que está junto al símbolo de «stop» en la barra de herramientas.

Al hacer clic en el ícono nos aparece una ventana en la que hacemos clic en Aceptar. Ahora veremos el proceso de subida del programa al controlador. Luego de esto, en nuestra pantalla podremos ver el mensaje que hemos escrito.
El siguiente video muestra el proceso completo para la escritura de mensajes en el RTC (recomendamos nuestro canal de Youtube, con múltiples videos sobre fischertechnik).
.
Esta pantalla puede mostrar uno o más mensajes, tanto en texto dinámico como en texto estático. Los textos estáticos no se modifican en el tiempo mientras que los dinámicos cambian en función del tiempo, tal como cuando se muestran lecturas de sensores.
Lecturas de sensores en la pantalla LCD del RTC
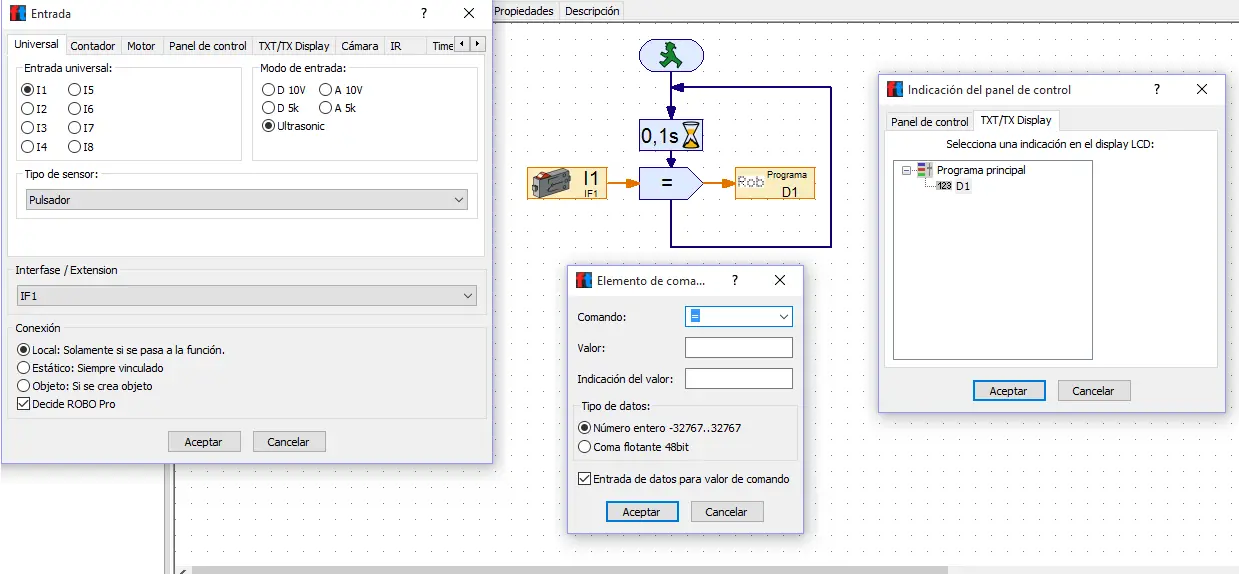
Para explicar el concepto del texto dinámico mostraremos la lectura de un sensor ultrasónico de distancia en la pantalla del RTC. Para ello necesitaremos conectar el sensor ultrasónico al controlador de la siguiente manera:
En la misma vista en que se muestra el sensor ultrasónico en la imagen, el cable de la izquierda se conecta a GND, el del centro a 9V y el de la derecha a una entrada digital, en este caso I1.
Ahora la programación podemos hacerla de dos formas: de forma secuencial dentro de una estructura repetitiva o dejando los controles del display LCD fuera de la estructura secuencial.
Primero vamos a colocar el texto que deseamos mostrar en la pantalla. En este caso será «D= 0».
Ahora agregamos la siguiente estructura de programación.
Las configuraciones de todos y cada uno de los elementos las mostramos a continuación:
También es posible que la programación sea de forma indefinida y no dentro de una estructura secuencial-repetitiva como el caso del diagrama anterior.
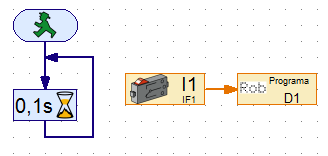
Cualquiera de los dos esquemas funcionará. El resultado debe ser el siguiente:
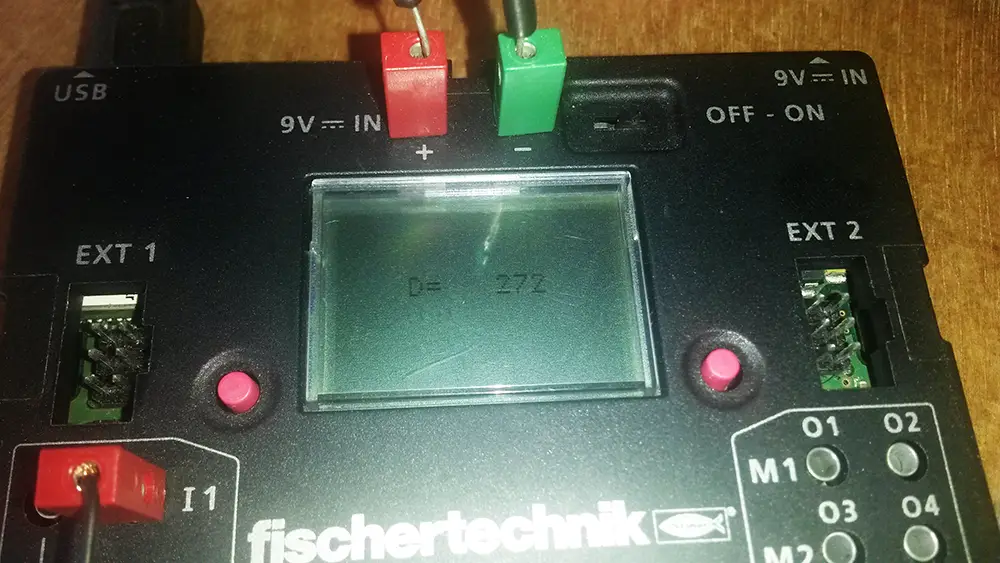
La distancia mostrada está dada en centímetros, por lo que el sensor está midiendo 2.74 metros. El concepto a utilizar para todos los sensores es el mismo: se asigna el valor medido por el sensor al panel de visualización y éste se encargará de mostrarlo en el display LCD.
Esta pantalla es sumamente útil para conocer el comportamiento de el diagrama de flujo en un momento dado. Su utilidad será evidente cuando se utilicen prototipos de robótica con múltiples sensores interactuando entre sí.
Sin más que decir, esperamos que todos y todas comprendan el material que hemos presentado en este post y que cualquier duda o comentario sea expresado a través de la sección de comentarios. Saludos.









