La importancia del Control de velocidad de Motor DC por potenciómetro radica en que el usuario podrá regular directamente la velocidad del motor DC, ajustándolo así a sus necesidades.
En otro post habíamos hablado sobre cómo regular la velocidad del motor DC por luminosidad (consultar Control de Velocidad de un Motor DC por Luz).
Los componentes utilizados en esta experiencia fueron:
- 1 Batería de 9 Voltios
- 1 Transistor NPN (C2073)
- Jumpers
- 1 Resistencia de 1 kΩ
- 1 Motor DC
- 1 Arduino Uno
- 1 Protoboard
- 1 Potenciómetro
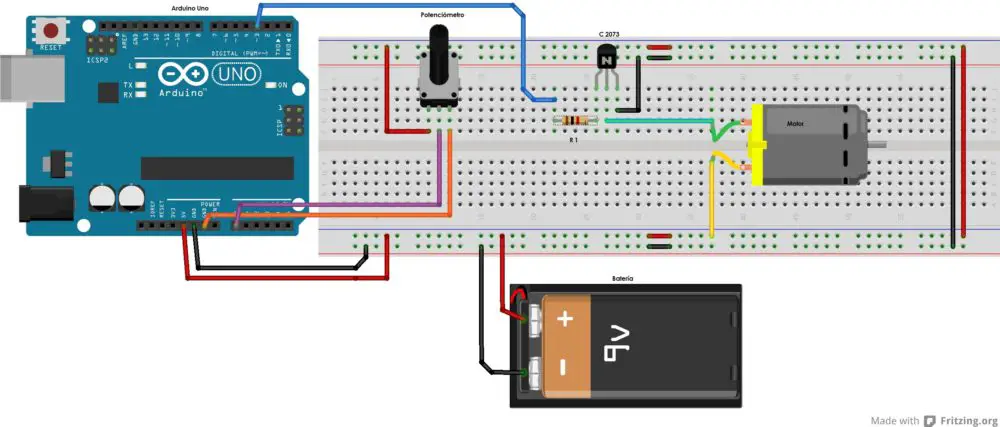
Para esta experiencia se empleó la siguiente configuración:
 R1 =1 kΩ
R1 =1 kΩ
En esta experiencia se utilizó potenciómetro, debido a que es un circuito con baja corriente, y no un reóstato ya que este disipa más potencia y es utilizado para circuitos de mayor corriente.
Los extremos del potenciómetro se conectan al +5V y a GND. El punto central, se conecta a una entrada analógica, en este caso (A0).
Como recordamos los pines analógicos en Arduino son manejados por un convertidor analógico/digital de 10 bits, por lo que entregan a su salida, valores entre 0 y 1023. De esta manera la tensión que entrega el potenciómetro a la entrada analógica, en la función analogRead, variará entre 0 (cuando esté a 0V) y 1023 (cuando esté a 5V).
Abrimos Arduino IDE y escribimos el siguiente código:
|
1 2 3 4 5 6 7 8 9 10 |
void setup(){ Serial.begin(9600); } void loop(){ float niv=analogRead(A0)/4; analogWrite(3, niv); Serial.println (niv); delay(1000); } |
Este código es igual al que vimos en el post Control de velocidad de un motor DC por luz.
Para tener un concepto más claro veamos el comportamiento del siguiente gráfico:
|
Valores de Lectura Análoga (analogRead(A0)) |
Velocidad del Motor DC |
|
0 |
0.0% |
|
54 |
5.3% |
|
93 |
9.1% |
|
142 |
13.9% |
|
201 |
19.6% |
|
315 |
30.8% |
|
393 |
38.4% |
|
474 |
46.3% |
|
574 |
56.1% |
|
640 |
62.6% |
|
733 |
71.7% |
|
854 |
83.5% |
|
967 |
94.5% |
|
1023 |
100.0% |
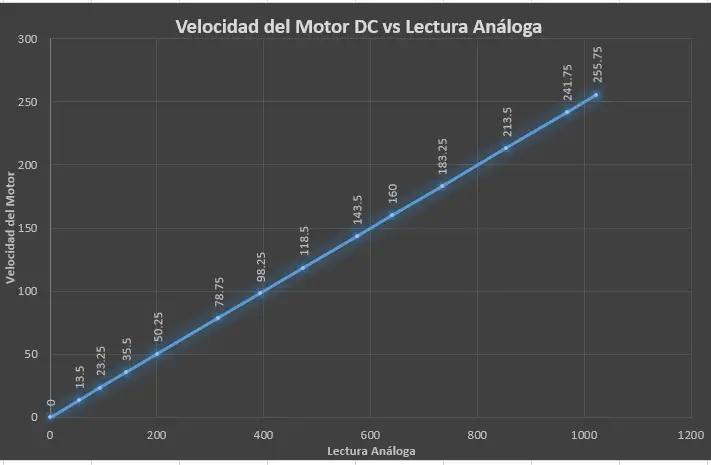
La gráfica muestra una relación directamente proporcional de la lectura análoga con relación a la velocidad del motor, que es la pendiente positiva que podemos apreciar.
En el siguiente video se muestra el proyecto ejecutado:
[youtube http://www.youtube.com/watch?v=x7RJDXfSuhU]
Espero que la información suministrada sea de agrado y utilidad para todos.
Saludos.















12 voltios
Debería funcionar de una vez
de cuanto es el potenciometro?
Cualquiera funciona
El valor no importa. Es solo un divisor de voltaje
Puedo usar un NPN D401A en vez del C2073??
Que diferencia hay?
La principal diferencia es la corriente que manejan
una pregunta si un motor DC de 5V cuyo velocidad es de 200RPM , si lo alimento con un voltaje de 2.5V obtendría 100RPM, a lo que quiere llegar es que la velocidad del motor tiene ese comportamiento lineal con respecto al voltaje que se le suministra al motor
No es exactamente de esa forma. La manera adecuada de controlar un motor DC es por PWM. No modificas la amplitud del voltaje, sino el ciclo de trabajo. El ancho del pulso de alimentación del motor. Si lo alimentas durante un segundo, le quitas la alimentación durante 1 segundo, y lo vuelves a alimentar durante 1 segundo y así sucesivamente, tendrás un ciclo de trabajo del 50%, donde la mitad del tiempo alimentas el motor y en la otra mitad no. Esto reduce efectivamente la velocidad del motor y causa que el voltaje medio registrado por el motor sea 2.5, si lo estás alimentando en 5.
puedo usar un pnp 20394
Revisa la corriente de colector