Un MOSFET es un dispositivo semiconductor utilizado para la conmutación y amplificación de señales. El nombre completo, Transistor de Efecto de Campo de Metal-Óxido-Semiconductor (Metal Oxide Semiconductor Field Effect Transistor, MOSFET) se debe a la constitución del propio transistor.
En Panama Hitek hemos publicado antes sobre transistores, específicamente sobre los BJT (Bipolar Jointed Transistor o Transistor de Juntura Bipolar):
Cuando hablábamos de los BJT, mencionamos que existen 2 tipos de transistores, los NPN y los PNP y que cuentan con 3 terminales: la base, el colector y el emisor.
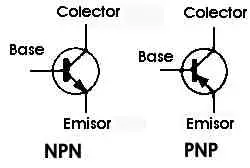
Los MOSFET poseen también 3 terminales: Gate, Drain y Source (compuerta, drenaje y fuente). A su vez, se subdividen en 2 tipos, los MOSFET canal N y los canal P.
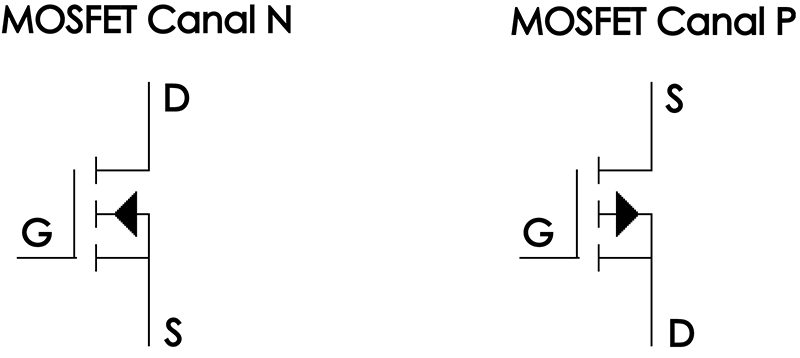
Existen diferentes tipos de MOSFET, dependiendo de la forma cómo están construidos internamente. Así, tenemos MOSFET de enriquecimiento y MOSFET de empobrecimiento, cada uno con su símbolo característico. Sin embargo, para efectos de este artículo simplemente consideraremos que los MOSFET de los que vamos a hablar son de enriquecimiento, utilizando la simbología antes presentada.
Ahora que conocemos la simbología, tanto del BJT como del MOSFET podemos establecer lo siguiente:
- Ambos dispositivos son transistores
- Ambos dispositivos tienen 3 terminales
- Ambos dispositivos pueden funcionar como interruptores (o conmutadores) y como amplificadores de señales
- Físicamente, ambos dispositivos lucen iguales:
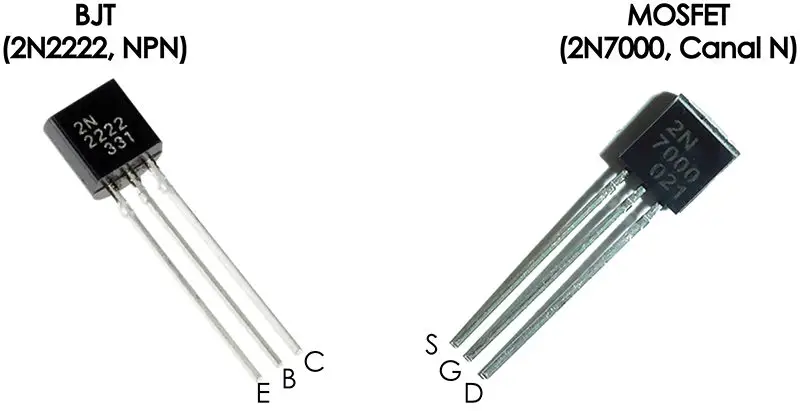
Ambos dispositivos pueden ser físicamente idénticos si se consideran 2 modelos con el mismo encapsulado. Lo único que hace la diferencia entre ellos es el número de serie, a partir del cual podemos reconocer si se trata de un BJT o un MOSFET.
Entonces… ¿cuáles son las diferencias entre un MOSFET y un BJT?
Debemos empezar mencionando la composición interna de ambos. Un transistor está constituido por elementos semiconductores, normalmente Silicio. Es aquí donde se mencionan algunos conceptos como dopaje, impurezas, regiones n y p, entre otros. Profundizar en este tema merece un post dedicado a ello. Por ahora, simplemente presentaremos una representación gráfica de la estructura del MOSFET comparada a la del BJT.
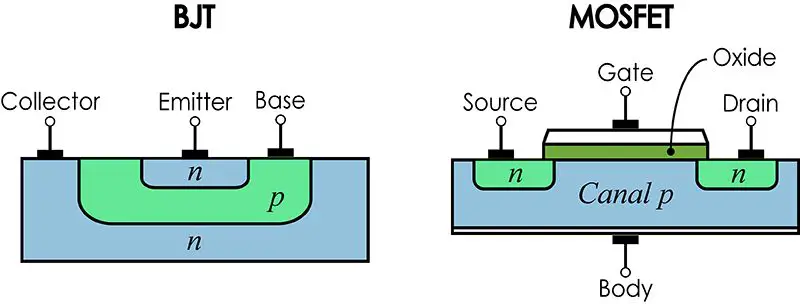
Como vemos, el MOSFET posee una composición un poco más complicada e incluye además de las regiones n y p, una capa de óxido metálico, de donde proviene su nombre. Sin embargo, la composición interna del MOSFET no es lo que nos interesa en este escrito. Nunca está de más mencionar los conceptos teóricos, por supuesto.
Los MOSFET son sumamente utilizados en electrónica digital, disciplina en la cual han desplazado a los BJT a través del tiempo. En un principio los transistores BJT causaron una revolución en el mundo de la electrónica, permitiendo lograr avances a pasos agigantados en comparación con los desarrollos que se daban en la época anterior al descubrimiento del transistor. El surgimiento del MOSFET fue posterior al del BJT, pero las ventajas que ofrece su uso, especialmente en la electrónica de microcontroladores, ha trazado una línea divisoria entre las aplicaciones donde se utiliza el BJT y aquellas donde es mejor utilizar un MOSFET. Pero, ¿qué es lo que hace la diferencia?
Hagamos una comparación entre una aplicación en la cual necesitamos conmutar una carga sencilla, en este caso un motor. Utilizando un simulador, vamos a crear un circuito que nos permite encender y apagar un Motor DC de 12 voltios y 1.5 amperios con un microcontrolador. Podemos pensar en un Arduino o en un RoboTX Controller de fischertechnik. Si se usa un RTC, la señal de control es de 9 voltios y entrega un máximo de 250 mA. Si es un Arduino, la señal de control es de 5 voltios y entrega un máximo de 40 mA.
Pensemos que el motor será controlado por un Arduino, osea que para encender el motor contamos con 5 voltios y 40 mA, lo cual es menos voltaje y menos corriente que la que necesita el motor (12 voltios y 1.5 A, donde 1A = 1000 mA, así que debemos entregar 5V y 1500 mA). Esto no significa que el Arduino no sea capaz de encender el motor que queremos utilizar.
Para ello podemos utilizar MOSFET o BJT. Veamos cómo sería el circuito con BJT:
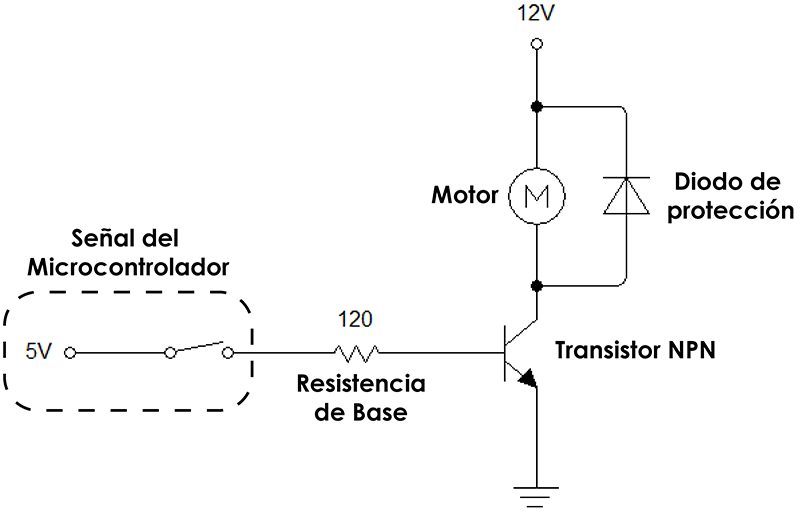
Para que el motor funcione debe estar conectado entre 12 Voltios y GND. Vemos que una de las terminales del motor está conectada a 12V pero la otra está conectada al transistor NPN (a través del colector). El otro extremo del transistor (emisor) está conectado a GND. Cuando se aplica una señal a la base del transistor, este se satura y se transforma en un circuito cerrado, el cual conecta un terminal del motor a GND. Esto permite que el motor empiece a funcionar, debido a que se cumple la condición donde un terminal está conectado a 12V y el otro a GND.
La señal aplicada a la base del transistor la proporciona el microcontrolador, representado como una fuente de 5 voltios con un interruptor. El funcionamiento del circuito lo podemos apreciar en la siguiente animación:

Hemos logrado con una señal de 5 voltios mover un motor de 12 voltios que consume 1.5 amperios. Sin embargo, esto no significa que lo hemos logrado de la mejor forma posible. Hagamos un análisis de los voltajes y los flujos de corriente en el circuito. Para ello utilizaremos instrumentos de medición, amperímetros y voltímetros.
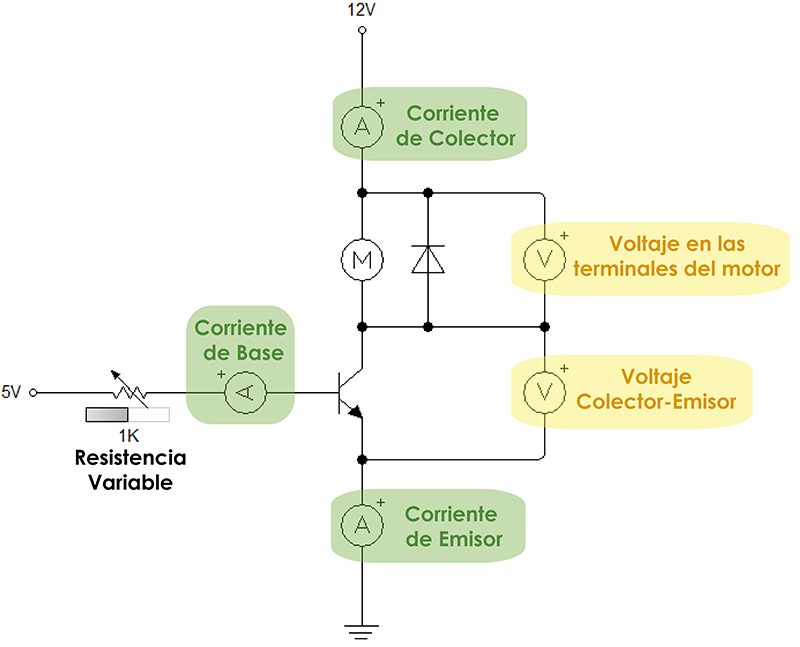
Se ha reemplazado la resistencia de base por una resistencia variable. Los medidores utilizados pretenden comprobar que se cumplan las condiciones esenciales para este circuito:
- La corriente de base debe ser mínima, ya que esta corriente la proporcionará el controlador. La función de un microcontrolador es entregar señales de control (voltajes), no corriente. Entre menor sea la corriente de base, más eficiente será el circuito de control.
- La corriente de colector debe ser cercana a los 1.5 amperios que consume el motor. El motor trabaja en condiciones óptimas cuando recibe 1.5 amperios, por lo cual se debe procurar que pueda recibir dicha cantidad de corriente.
- El voltaje en los terminales del motor debe ser lo más próximo a 12 voltios
- El voltaje colector-emisor debe ser lo más cercano a 0 voltios, para evitar caídas de voltaje que reduzcan el voltaje en los terminales del motor y para reducir el consumo de potencia del motor.
Dentro de lo posible, el circuito de control debe comportarse de la siguiente forma:
 Como vemos, un voltaje cercano a 12 voltios en las terminales del motor, una corriente cercana a 1.5 amperios, un voltaje cercano a 0 voltios en el conmutador (interruptor). 1.48 mV es 0.00148 voltios, es decir, casi cero. El transistor que utilicemos debe ser como el interruptor de la animación, con una caída de voltaje insignificante.
Como vemos, un voltaje cercano a 12 voltios en las terminales del motor, una corriente cercana a 1.5 amperios, un voltaje cercano a 0 voltios en el conmutador (interruptor). 1.48 mV es 0.00148 voltios, es decir, casi cero. El transistor que utilicemos debe ser como el interruptor de la animación, con una caída de voltaje insignificante.
Veamos las corrientes y las caídas de voltaje cuando utilizamos un circuito con un transistor. Utilizaremos una resistencia de 1 KΩ como resistencia de base.
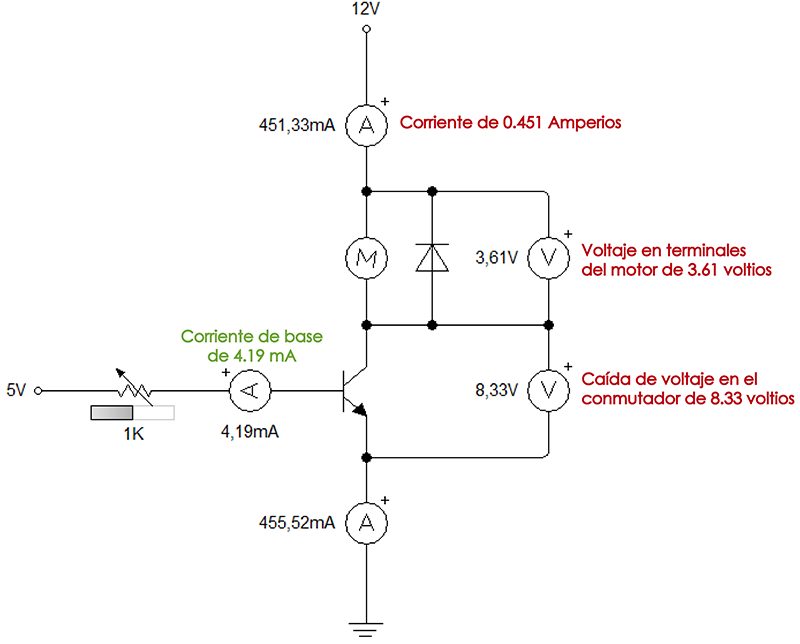
De las 4 condiciones esenciales que se deben cumplir, solamente una es considerada como adecuada (la corriente de base). Este circuito no es adecuado para el control del motor. Podemos probar modificando el valor de la resistencia de base a un valor más alto o a un valor más bajo y comparar los resultados.
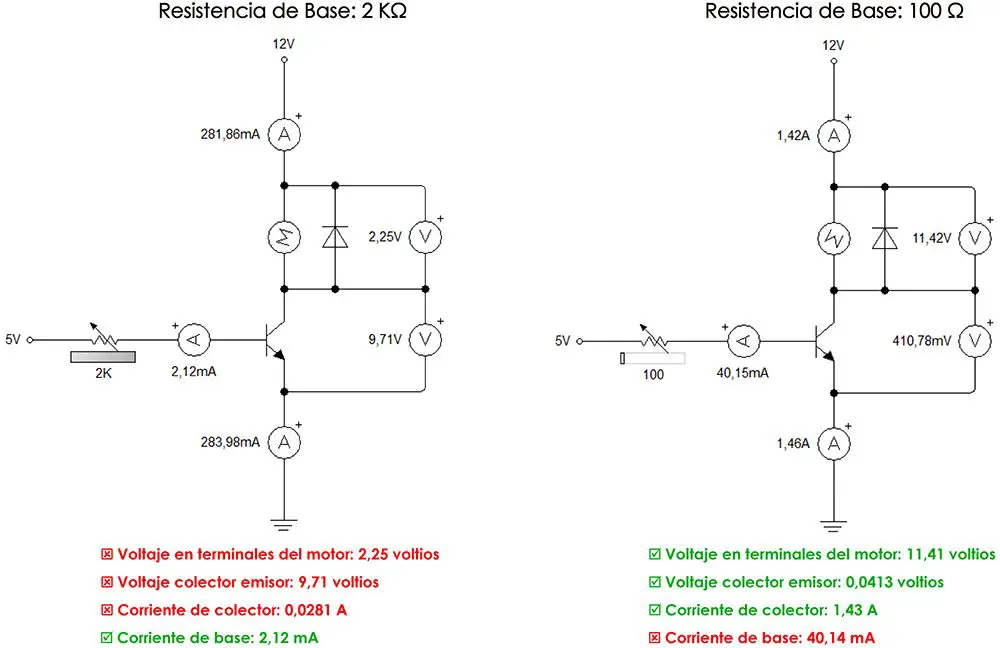
Los resultados demuestran que el utilizar una resistencia de base de un valor bajo (en este caso 100Ω) mejora notablemente las condiciones del circuito de control con respecto a los resultados obtenidos con un valor de resistencia alto (sea 1KΩ o 2KΩ). Sin embargo, no podemos escoger un valor de resistencia al azar, ya que el valor de 100Ω que utilizamos provoca una corriente de base de 40mA, los cuales debe proporcionar el microcontrolador. En el caso de Arduino, la corriente máxima que podemos obtener de un pin digital, como ya dijimos, es de 40 mA, por lo que Arduino podría controlar perfectamente el motor (la corriente de base es 40,15 mA, lo cual es un valor tolerable).
Aún así, el Arduino como microcontrolador debe entregar señales de voltaje, no de corriente. Someter el microcontrolador a una corriente de 40mA (una corriente pequeña) durante un periodo de tiempo terminará estropeando nuestro dispositivo. Y ese es el problema con los BJT: requieren de una corriente de base para su funcionamiento. Esta corriente termina uniéndose a la corriente de colector para formar la corriente de emisor, la cual es la suma de ambas. Esto lo podemos observar en los diagramas presentados (por ejemplo, 1.42 + 0.04015 = 1.46).
Si deseamos conmutar cargas de corrientes pequeñas (menores a 2 amperios) podemos utilizar los BJT. A medida que aumente la corriente de carga del dispositivo que deseemos controlar, la corriente de base irá aumentando y llegará el momento donde el propio BJT terminará dañando el controlador al exigirle demasiada corriente.
Es aquí donde consideramos los MOSFET. A continuación veremos un circuito sencillo de conmutación con un MOSFET.
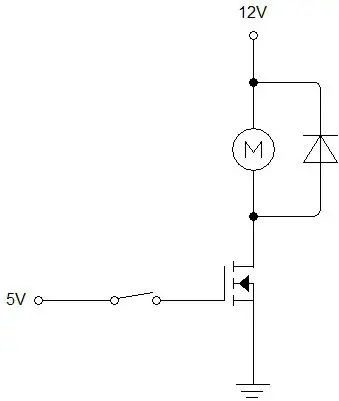
Este circuito en teoría es correcto, sin embargo en la práctica se acostumbra utilizar una resistencia pull-down entre la compuerta y tierra. Esta resistencia debe ser de un valor alto, ya que a través de ella cruzará una corriente que se mantendrá constante. Entre mayor sea el valor de la resistencia pull-down, menor corriente de desperdiciará y más eficiente será el circuito. El circuito correcto para un conmutador a base de MOSFET es el siguiente:
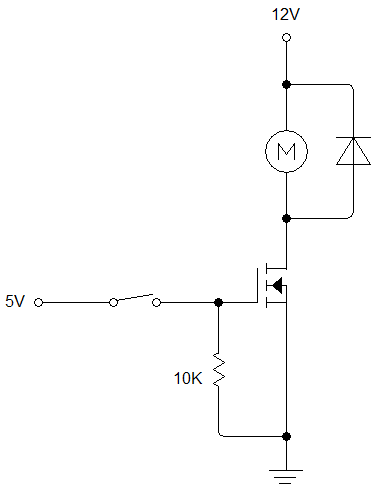
Este circuito, por supuesto, cumple con su función.
Pero, ¿qué tan eficiente es?. Después de todo, con un BJT se logró una simulación exitosa, pero que en la práctica comprometería la integridad del microcontrolador. Utilicemos nuevamente los medidores de voltaje y corriente para determinar si el circuito utilizado es eficiente o no.
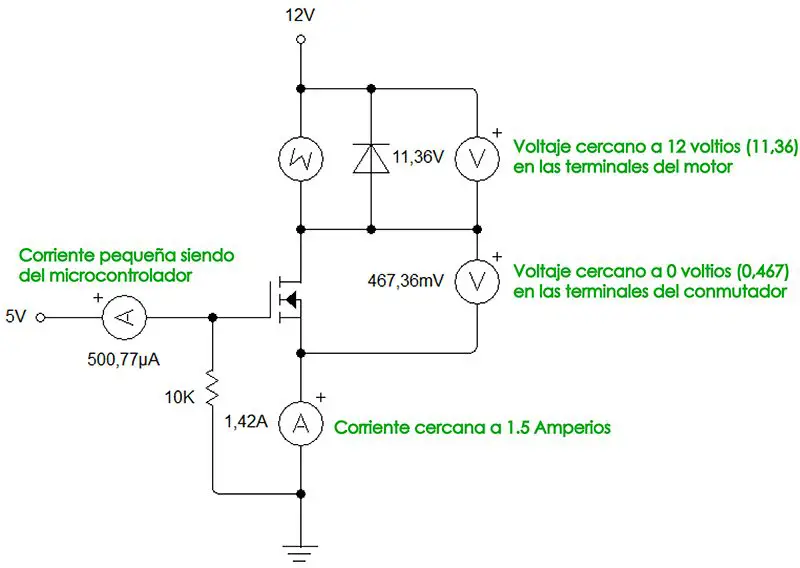
Vemos que se cumplen todas las condiciones necesarias para considerar al MOSFET un buen conmutador. ¿A qué se debe esto? El MOSFET no requiere de una corriente en la compuerta, sino que se trata de un transistor conmutado por voltaje, a diferencia del BJT que es un transistor conmutado por corriente. Esto hace que este dispositivo sea el más utilizado actualmente en electrónica digital.
En cuanto a los microcontroladores, estos podrán controlar cargas de altos voltajes y corrientes significativas utilizando una señal de voltaje, sin tener que entregar una corriente. En el diagrama mostrado, hay una pequeña corriente de 500 microamperios saliendo de la fuente de 5 voltios, lo cual es insignificante. Esta corriente se va a través de la resistencia de 10K. Si aumentamos este valor, la corriente que entregará el microcontrolador será aún menor y el comportamiento del circuito no se verá afectado.
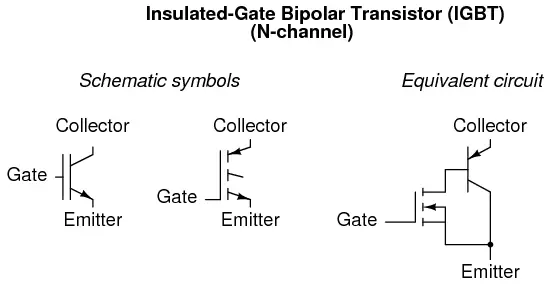
Los MOSFET tienen también la ventaja de ser capaces de conmutar señales de alta frecuencia, debido a un tiempo de conmutación en el rango de los nanosegundos . La desventaja es la incapacidad de manejar altos niveles de corriente. Para corrientes altas el BJT siempre será el mejor, aunque debemos recordar que entre mayor sea la corriente de carga, más aumenta la corriente de base. Para resolver este tipo de situaciones se ha diseñado un tipo especial de transistor conocido como IGBT (Insulated Gate Bipolar Transistor) el cual es una combinación de un MOSFET y un BJT, aprovechando las características de alta impedancia de entrada del MOSFET y el manejo de corriente del BJT.
Los IGBT, sin embargo, merecen un post exclusivo para ellos, el cual planeamos compartir con ustedes en el futuro. Al final, podemos concluir lo siguiente:
- ¿Qué es un MOSFET? Es un transistor, similar a un BJT en cuanto a funciones pero diferente en cuanto a estructura interna y modo de funcionamiento. Los BJT funcionan con señales de corriente, mientras que los MOSFET funcionan con señales de voltaje, lo cual hace de los últimos la herramienta por excelencia para el control digital.
- ¿Para qué se utiliza un MOSFET? Estos dispositivos se utilizan en la conmutación de cargas de alta velocidad, dado su tiempo de respuesta mínimo. Se utilizan para el control digital de cargas de mayor corriente y mayor voltaje que los valores nominales que puede soportar un microcontrolador. Son muy buenos en la amplificación de señales analógicas, especialmente en aplicaciones de audio. Al igual que los BJT, poseen múltiples funciones en diferentes tipos de aplicaciones en el mundo de la electrónica, de las cuales solo hemos estudiado la conmutación y apenas mencionado la amplificación de señales.
Esperamos que la información mostrada sea de su comprensión. Cualquier duda, sugerencia o comentario es bienvenido en nuestra sección de comentarios. Saludos.














")
Que buen artículo. Saludos!
Gracias amigo
Muy buen artículo, enhorabuena.
Sin embargo me gustaría indicarle que sería conveniente añadir una nota en la parte en la que habla de la intensidad máxima que soporta cada pin de las placas arduino, puesto que es diferente según el modelo de placa Arduino.
En el caso concreto de la placa Arduino Mega 2560, la intensidad máxima por pin es de 20 mA, siendo la recomendada de 10 mA. En este caso, hacer circular una corriente de 40 mA por un pin sería nefasto.
Le dejo un enlace al pinout de la Arduino-Genuino Mega 2560:
http://www.pighixxx.com/test/portfolio_category/mega2560/#prettyPhoto%5Bgallery282%5D/0/
También un enlace a las características de la Arduino-Genuino Mega 2560:
https://www.arduino.cc/en/Main/arduinoBoardMega2560
Nota: Un rápido vistazo por las placas disponibles a día de hoy (09/ENE/2017), me lleva a confirmar la importancia de revisar las especificaciones de cada placa antes de conectar algo a ellas:
– Arduino UNO (ATmega328P): 20 mA por pin.
– Arduino 101 (Intel Curie): 20 mA por pin.
– Arduino Micro (ATmega32U4): 20 mA por pin.
– Arduino MEGA (ATmega2560): 20 mA por pin.
– Arduino ZERO (ATSAMD21G18, 32-Bit ARM Cortex
M0+): 7 mA por pin.
– Arduino MKR1000 (SAMD21 Cortex-M0+ 32bit low power
ARM MCU): 7 mA por pin.
Un saludo.
Hola. Si es correcto. Cuando hablé de 40mA es para el Arduino UNO. Ptros modelos tienen corrientes máximas diferentes tal como usted resalta
Entonces la corriente máxima que soporta el Arduino UNO es de 40mA? O de 20mA?
40 mA por pin. La suma de todas las corrientes no debe superar 200 mA
me gusto
(Y)
(Y)
Muy buen post, una pregunta, si quisiera conmutar un voltaje de 2000v a 100mA , que Mosfet o IGBT me recomendarias? Muchas gracias de antemano.
Te recomiendo el siguiente post: https://panamahitek.com/el-arte-de-escoger-un-buen-transistor/
Excelente post mil gracias pude entender bien las diferencias gracias
Gracias
Excelente artículo!
Me encanto está publicación, gran esfuerzo en explicación, trabajos asi merecen ser compartidos y reconocidos
Excelente explicación Antony García González, es muy clara y abarca con detalle las diferencias, como funciona y criterios para su uso, excelente documento. Felicitaciones.
Bravo!! la capacidad didáctica es un don.. y sinceramente, en este artículo lo ha conseguido
Felicidades, gran contribución
Geniooo!!! entendi todo!!! Abrazo!!
Muy buen artículo y buenos aportes, gracias.
Personas así como tú necesita más el mundo. Gracias hermano entendí todo.
es primera vez que conozco de un transistor de esta clase,y tengo que estudiarlo bastante,si me manda vídeos,cuanto se lo agradezco,desde cali Colombia.
Artículo 100% recomendable.
Me encantó.
Muchas gracias por compartirlo, un saludo.
Joe.
MUy buen post Ingeniero estoy reparando una fuente de poder correspondiente un calentador de parafina cuya temperatura no debe exceder de 60Grados Centigrados se fundio un componente smd tengo la duda si es un Transistor BJT o MOSFET, este dispositivo conmuta para alimentar los reguladores de 5vol y 12vol creo que estaba escrito sobre el elemento fundido 11A, en la placa tiene la descripcion T1 lo cula corresponde a un transisitor, pero al buscar 11A en smd aparece como un zener, he alli mi duda, que aconseja pruebo con un BJT o un MOSFET smd? Gracias soy Isaac Rodriguez TEC Electromedicina Barquisimeto Estado Lara Venezuela
Si es BJT o MOSFET funcionan similar, con la diferencia de que el BJT requiere corriente para su operación y el MOSFET no. Yo utilizaría un MOSFET como remplazo
Me encantó toda la explicación y me fue de mucha utilidad. Recomiendo para mayor experiencia y aprendizaje de los lectores y amante de la electrónica una explicación detallada de como medirlos con un Multímetro Digital o casero.
Muy bien explicado, los ejemplos son de lo mejore. Da gusto leerlo.
Gracias por el articulo.
que bueno es tener una asesoria y explicada de una forma comprensible felicitaviones al Ing.
Gracias
BIEN EXPLICADO ME SACO DE DUDAS PARA TERMINAR DE CREAR MI FUENTE DE PODER
excelente… ahora una pregunta para que el mosfet conmute debe existir 5 voltios en la gate?
Eso depende del transistor
Hola. Estoy implementando circuitos de control para conmutar electrovalvulas a través de un sensor que varia voltaje en dependencia de la velocidad de un motor. Este circuito se alimenta con 12 volts, pero la etapa de control es alimentada con 6.8 volts. Mi pregunta es si a la hora de seleccionar un mosfet para la conmutación, que hasta ahora la había hecho a través de relés controlados por transistores, pero que en un periodo de tiempo dan fallas de carácter mecánico, como se el rango de voltaje que necesito para aplicar en el gate. Este dato me lo brinda el datasheet del elemento en cuestión o es algo que puede variar en dependencia de la aplicación que se quiera llevar a cabo. La otra pregunta es si podemos considerar similar un BTJ NPN y un MOSFET canal N. Esto lo pregunto para saber por donde debo alimentar la carga.
En efecto, es un dato del dispositivo. Todo MOSFET tiene un voltaje de compuerta (Gate), por lo que debes asegurarte de que el voltaje aplicado al gate sea igual o mayor al voltaje que requiere el MOSFET para abrir completamente el canal. Si se aplica un voltaje menor a la compuerta se te formará una diferencia de potencial entre Drain y Source y el transistor disipará potencia y se calentará. Lo ideal es que el canal quede completamente abierto para que la disipación de potencia sea mínima y el MOSFET se acerque a un interruptor ideal
gracias señor ANTONY
Profesor Antony:
Mis palabras no bastarán para llenarle de elogios, con su pedagogía he aprendido muchísimo, en esta época de crisis Covid 19, que recién leo su artículo 16/04/2020), me ha servido de relajamiento y disfrute de voltaje de operación su sabiduría. Una consulta, este MOSFET está siendo usado mucho en los circuitos de las lavadoras, exactamente en el Drain Motor, y lo que hace es entregar dos voltajes, 1) entre 0 y 100 VDC conocido como voltaje de arranque (START) y 2) de 15 a 17 VDC como voltaje de operación. Por favor podrías explicarme como lo realiza este funcionamiento el MOSFET ¿es acaso controlando el voltaje en el Gate del transistor? para obtener el paso de Source a Drain, de estos dos voltajes bien diferenciados en magnitud.
Que Dios te bendiga.
Saludos desde Trujillo Perú
En teoría el MOSFET se comporta como una resistencia variable controlada por voltaje. Si aplicas un voltaje igual o mayor al voltaje de compuerta (gate) en el gate del MOSFET, el canal quedará completamente abierto y ofrecerá una resistencia nula (o casi nula) al paso de la corriente. En este modo de operación, el MOSFET funciona como un interruptor similar a un interruptor ideal, con un pequeño consumo de potencia.
Sin embargo, si se aplica un voltaje menor al Vgate (especificado en la datasheet) a la compuerta del transistor, este no abrirá completamente el canal de conducción del MOSFET y se formará un voltaje entre Drain y Source que, al conducir corriente, disipará una cantidad considerable de potencia y el MOSFET se calentará.
Ese voltaje puede considerarse como una caída de voltaje a través de una resistencia. Como esa caída depende del voltaje en la compuerta, podríamos decir que el MOSFET es una resistencia variable controlada por el voltaje de la compuerta.
En el caso que mencionas, nada de esto importa. Allá se usa el MOSFET como un interruptor ideal, así que se le debe aplicar un voltaje de compuerta igual o mayor al especificado en la hoja de datos para que no haya caída de voltaje y no haya disipación de potencia. Recuerda que potencia disipada es igual a pérdidas de energía para los clientes, así que no creo que la modificación del voltaje de compuerta sea usada para lo que comentas. No sería práctico.
Un capo!!!
Mi agradecimiento este articulo me disipo muchas preguntas que tenia muchas gracias saludos
ing. como podria comprobar con mi tester que mi mosfet esta en buen estado. saludos
ing. como podria comprobar con mi tester que el mosfet está en buen estado. sin necesidad de elaborar un circuito. saludos bendiciones
¿Por qué el MOSFET de empobrecimiento no es el indicado para manejar en electrónica de potencia? y ¿por qué el de enriquecimiento sí?
Un artículo muy práctico.
Muy claro, gracias.
Hola,
El articulo está genial. Pero me pegunto como se buscan. Si necesitas un transistor que opere de un control de 3.3v y que tiene que hacer de switch para una señal de 5v@350mA como encuentras un transistor que cumpla con esos requisitos. Me parece complicado de encontrar entre tantos. ¿Hay algun truco?
Eso que quieres hacer es un arte. Esto te puede ayudar: https://panamahitek.com/el-arte-de-escoger-un-buen-transistor/
el dibujo de la derecha seria canal N en vez de canal P no?
magnifico reportage
magnifico reportage me gusto muchisimo
Excelente explicación, me hubiera encantado que me lo explicaran así cuando me inicié en la electrónica, me hubiera ahorrado muchas lágrimas.
Gracias por los buenos comentarios
Esta genial! Ojala lo explicaran así en la carrera. Saludos desde España!
Muchas gracias por la explicación!!. De entre todos los foros usted es el que mejor lo ha explicado para los que le batallamos a la electrónica xd
Excelente explicación, lo entendi claramente.